Multi Copter Photography and Photogrammetry
Multicopter Photography and Photogrammetry

Late this year I bought a Phantom 3A (Advanced). The prices went down and these platforms are so affordable now that it makes sense to test it out.
The main applications for my work are multifolded:
- Special shootings for paying clients,
- regatta event shots from above,
- very early morning misty landscape stills and
- large scale or near range photogrammetric mapping for research purposes with applications in forest biomass mapping and archaeology as well as biotop-typ delineation and fine scale analysis of vegetation structure and slope stability analysis.
Clearly 1-3 and 4 will very nicely cooperate. Its just wonderful to experience how photography and research can come together here, makes me wonder sometimes how I managed to get into that cool spot where I get payed to fly a remote controlled camera … :-)

Being not new to copter flying, I found the Phantom 3 to be really easy to fly. Once you mastered the documentation and some basic theory about controlling a quadro-copter its really a simple excercise to control these devices. This is mainly due to the perfect GPS controlled position hold of the Phantom. It just stays where you put it (in opposite to gliders) and this makes it also kind of boring to fly a copter. The DJI GO app that is used on a mobile device to check the telemetry data and to control the lifeview provides a nice overview about position, viewing angle and overall status of your copter. You can also modify shooting parameters, change the camera viewing direction and check speed, height and remaining flight time, battery status and the number of satellites. Other apps support fully automatic mapping modes with variable overlap configurations (Data Mapper or Drone Deploy).

P3 installed on a LowePro backpack fully functional with installed props and ready to fly in a minute.
Some DJI Phantom 3 A Specs:
- Image Data capturing in 12MP Adobe DNG RAWs, gimbal stabilized! & damped. 2. HDR with 5 exposures each 0.7EV under/over-ex-> RAW DNG HDR computation. 3. Sony EXMOR 1/2.3“, 12.4MP, 94°lens (20mm focal length equiv. tilt.), ISO100-3200, 8-1/8000s, single shot, multiple shot, exposure series (3/5), DNG RAW format, video: FHD upto60p, 2.7k upto30p, 4. Memory: MicroSD up to 64GB cat10.
- Control: GPS/GLONASS controlled position hold, visual Realtime-Position-Tracking (VPS – Vision Positioning System) up to 3m flight alt. (P4pro: 10m). RTH (Return to Home Funktion), Battery Low RTH, Security-RTH, software controlled flight altitude (override possible): 120m, autostart/-landing, beginner modi, (OrbitModi/anti- collision (infrared/ultrasonic)/ActiveTracking/terrain follow: P4/pro/Mavic), P-GPS – GPS controled stabilising (+/-10cm position), P-OPTI (optical position control & stabilizing), P-ATTI modi (flight altitude only (barom.) – copter could start to drift).
- Flight parameters: weight: 1280g, climb: 5m/s, descend: 3m/s, Vmax: 16m/s (ATTI) – 60km/h, flight altitude max: 6000 m (airspace above 100 m needs a clearance (approval), RC max distance: 5km, flight time: 23 min (30min: P4pro), RadioControl: 2,4khz RC with iPad/iPhone (build in DJI Lightbridge System), realtime lifeview control per DJI GO App.

READ MORE:
As easy as handling goes the paper work involved is at the time of writing already making things more difficult than some years ago. First obviously an insurance is needed for all kind of copter flights – doesnt matter if you fly private or for a client or for a scientific/research purpose (this hasnt change). You need an insurance! The other paperwork sub chapter is the flight allowance for the country you want to fly in. In Germany its the regional government where you apply for a license. So if you plan to fly in Berlin you need to get a different allowance than when flying in Mecklenburg-Vorpommern. The regulations are more or less the same and costs are comparable (140-160€ per year). In Berlin you only get event specific allowances. You in fact can only fly at a specific defined day (and that day might be rainy or foggy … ). New regulations for copter flying will make this likely more complicated. Some people did not accept the 100m altitude limit and created dangerous near misses in restricted areas.

Using the Phantom 3A – the image data is indeed „acceptable“ when you blow all whistles and do careful post processing. Thats exactly how others have put it and I would adjoin to use the word „acceptable“. Its not great but you can use the image data to create larger plots. The Phantom 3 shots can be saved as DNG RAW Files and the camera can generate 5 shots with 0.7EV exposure difference. In post processing you’ll want to create CA free clean and sharp shots using a lens preset f.e. in LR for the DJI Phantom lens. This effectively removes chromatic aberrations and generates acceptable sharp shots. When you come from a full frame DSLR you might feel that the shots are sometimes a wee bit too soft. With the P3 you cannot adjust the aperture (wouldnt make much sense anyway as diffraction would quickly kick in) but you can increase exposure speed easily by upping the ISO. At ISO100 the camera is comparably noise free but increasing the ISO values isnt very useful above ISO200 – you quickly remove details from your files.
After lens profile based corrections and sharpening I usually generate the HDR shot – in LR this creates another DNG where editing is than easier as you have slightly more dynamic range. So far I found it only useful when I shoot against the sun to avoid solarization. The dynamic range increase isnt helping too much with mid grey value dominated nadir kind of shots with low overall contrast.
To create higher resolution panorama shots, I usually import the images to Autopano Pro. Lightroom/Photoshop isnt a fav. for panorama stitching tool for me (keep in mind that Adobe is promoting the creative cloud aggressively – this might not be the best solution for your workflow – LR is also avail without a cloud subscription – this is not easily visible on their website).
Over water copter flights are much more complicated. You do not have an RTH option that brings the copter down to your starting point, because your starting point is after a while not anymore your position. On a boat you always drift. Fying over water isnt much different to normal flights but you loose part of your safety system. From my initial tests I wouldnt hesitate to use the copter up to 3Bf but above that it gets complicated and dangerous. If the copter wont fly against the wind it will drift leewards and control is limited to modifying height – you basically have to follow quickly and bring the system down somewhere safely – obviously this is not a good idea in urban environments or on water. Perspective over water is wonderful – you can even generate maneuver time series without much problems. Also the starting line scenery is interesting with multitemporal layer stacks. This is clearly something that I have to give a try next year :-).







Photogrammetric mapping of larger areas and 3D point calculation of 3D Objects is done in Agisoft Photoscan. This is an easy to use professional photogrammetric software package, that also digests near range datasets. Agisoft aligns all photographs by using the Lat/Lon position of the shots and the relative barometric height information from the copter that was written into the metadata of the DNG Raw image files and searches for identical features in the overlapping imaged data. Detecting the feature offsets in different images the depth and height is calculated and a point cloud data set is generated that can be export to a binary LAS file. At that point within the workflow one can also create the digitale surface model (DSM) of the area and the image data mosaic (ortho level corrected). Georeferencing can be set to UTM WGS84 projection f.e. but height information needs some correction mainly because height is a relative barometric measurement and not GPS or ellipsoid derived (the copter doesnt know anything about the Ellipsoid/Geoid but the copter gets the GPS/GLONASS coordinates to get the lat/lon position right).
In consequence you can generate fascinating 3D object models. Some examples from recent flights within the canopy structure are included below.

A horizontal shot from the copter into the crown structure.
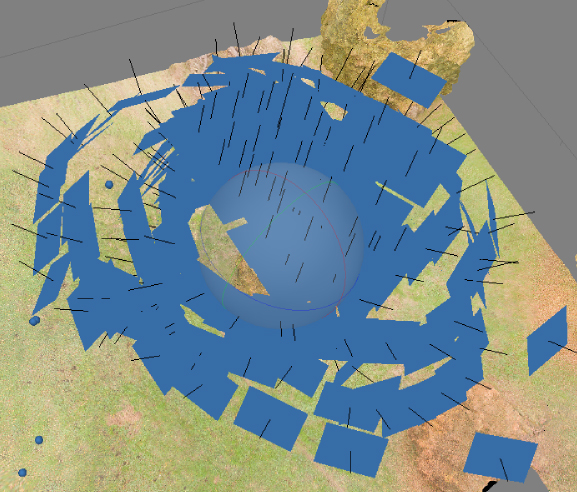
The position and direction of the various overlapping shots that were done to generate the point cloud model below.
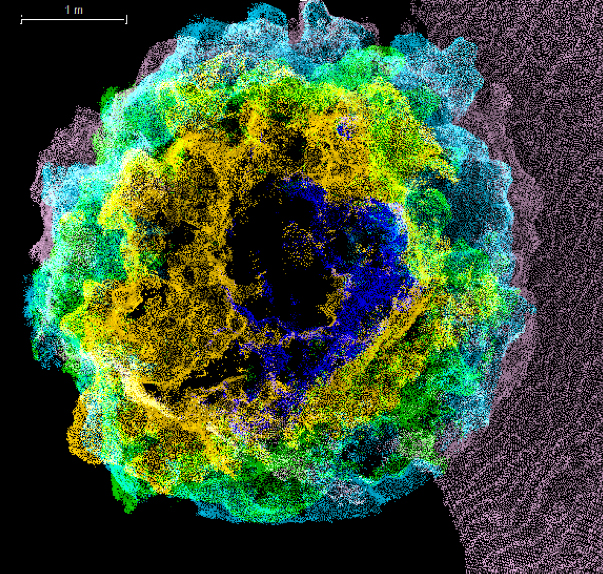
The point cloud model of the tree crown. 20Mio points with height information – here visualized with 1m height classification.
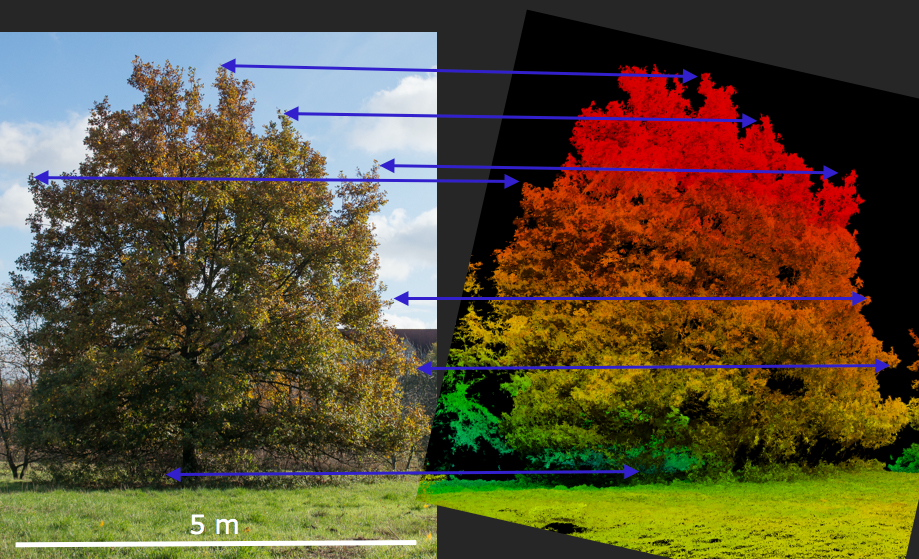
Comparison of an horizontal DSLR photo and the final tree crown point cloud model from photogrammetric processing all shots. Most of the branches and tree structures are represented by the full 3D point model.
Phantom 4 Pro:
The new Phantom 4 Pro will likely be a game changer for the photogs because the 1 inch sensor with 20MP will provide more resolution and better dynamic range. The 24mm lens (84°) of the P4pro ist the best of both worlds and a good compromise between wide angle and enough overlap to create high res panoramas and large high res nadir image mosaics. Allthough I would prefer 28mm equivalent here. The filming options include 4k in 60fps.
The other aspects of the P4Pro series mainly iterate around longer flight times, better 3D obstacle sensing and some new gimmicks ala selfie shots and follow modes. The Inspire 1 also got an update to version 2 and is even a better tool for photographers and videographers. The speed of the technology-update cycles within the copter tech domain is just mind blowing. I guess the full DSLR capable copters will also come down to affordable prices in the next years.
Problems:
– P3A lens FOV is too wide (20mm) for high res data-mosaics (MavicPro/P4Pro are better – 28/24mm)
– The sensor is too small (X5 Zenmuse/Matrix/P4Pro/Inspire2 are much better),
– The camera cannot be changed for a different high res model.
– Landing without catching is a problem,
– No emergency shutdown of engines (if copter capsized at landing).
– continuous shooting can become slow in low temperatures (needs check with indoor temp.).
Potentials:
- Low cost mapping of large areas in the visual spectral domain –& fine scale 3D point cloud calc. is possible /TLS competitor in close range applications if you have some DGPS reference points for more precise (and absolut height) georeferencing.
- LiveView with App and iOS/Android devices opens lots of applications – path mapping / orbiting / „Director“ solution pp – very fast growing App market.
- Matured technical concept/ it works! Control and gimbal stabilization work perfect, lifeview – telemetry – RTH are reliable.
- Its really fun! Go out map and generate your own data – georeferenced data on your desktop the same day!
- Very small package that can easily be moved into the terrain and transported for longer hikes. Very good intro to copter photography – getting used to thinking in 3D changes the previsualization of photography completely.
The Phantom changes your perspective for photography – start previsualising in 3D – „how will the sunset look like when I put the copter behind that tree top of 25m height tomorrow early morning when the first rays will hit the top … ? etc. Especially low illumination angles generate fantastic shadowing and water surface reflections are interesting.
Potential for mapping of high speed changes (series of shots).
Stay tuned when I give the Phantom 4 Pro a try and compare the image quality. I will also talk about MC-Cases that seem to be the perfect case solution for the Phantoms:

Best Apps:
- GO DJI (default control and flying software for DJI copter systems, no automatic waypoint mapping!)
- Altizure (cloud service) with Photogram.
- Pix4Dmapper Mesh (DJI) (yearly rental)
- FPV Camera for DJI
- Drone Deploy (commerical mapping with NDVI and Volume calc.) Photogram. subscription cloud comp.
- Datamapper (commerical mapping with NDVI and Volume calc.) Photogram. subscription cloud comp.
- Drone Director, Map Pilot for DJI, Litchi for DJI).